微型机器人领域的研究人员面临的关键问题之一是设计和实现昆虫规模的微型飞行器(FWMAVs)的可靠控制器。事实上,冠蓝在线测速尽管这些昆虫大小的机器人可以有许多有用的应用,例如,帮助人类在搜索和救援任务或在农业,发展控制器匹配他们的大小和结构到目前为止被证明是困难的。
南加州大学(USC)的研究人员最近进行了一项研究,探索设计这些控制器的挑战。在arXiv上发表的论文中,他们介绍了一种新的统一方法,这种方法可以帮助开发更有效的控制FWMAVs的技术。这项研究背后的研究人员是自主微机器人系统实验室(AMSL)的一部分,AMSL继承了20多年前从加州大学伯克利分校(UC Berkeley)开始、从2005年到2013年在哈佛大学(Harvard)一直延续到南加州大学(USC)的一个研究系列。
“我们作为一个团队,有着许多微型机器人社区的共同梦想;这项研究的首席研究员Nestor O Perez-Arancibia教授告诉TechXplore。“就我个人而言,我受到大自然的启发。我们的机器,包括Bee+,这是一个令人惊叹的工程,在飞行能力、驱动、传感、计算能力等方面仍然落后于真正的昆虫。”
多年来,Perez-Arancibia一直在进行微晶系统的研究。他认为,如果从大自然中汲取灵感,例如通过观察和复制蜜蜂、蝴蝶和蚊子的行为或特征,所有的人造机器最终都能得到改进。
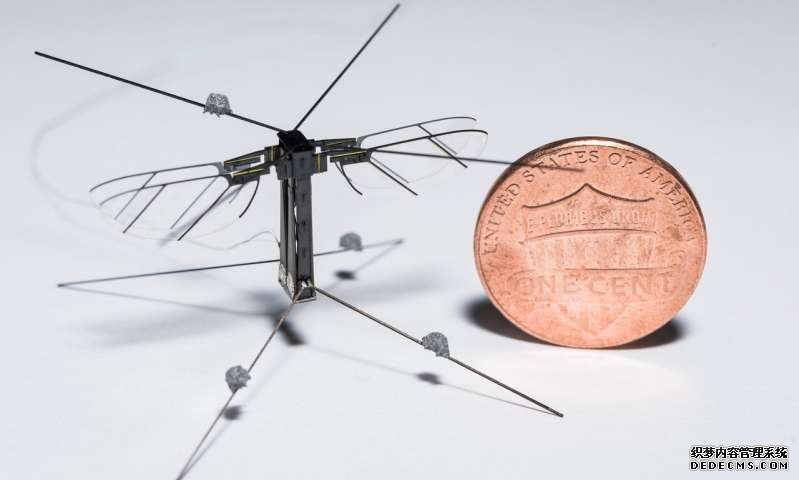
在他们的研究中,Perez-Arancibia和他的同事使用两种不同的实验平台来研究飞行昆虫的控制:一种是类似蜜蜂的两翼机器人,另一种是由USC开发的四翼蜜蜂+微型机器人。在一系列的实验中,他们证明了一种利用四元数坐标进行姿态控制的技术,该技术设计用于控制带有四个旋翼的无人驾驶车辆,监冠测速可以同时驱动这两种机器人昆虫。
Perez-Arancibia说:“我们能够简化许多研究人员认为非常困难的事情。”我愿意相信这是一个智能建模的实例。我们可以理解和分析看似棘手的复杂现象,从而帮助我们开发出更好的机器人设计,尤其是在气动力的产生、机构配置和驱动方面。”
Perez-Arancibia和他的同事进行的试验结果表明,他们引入的通用策略可以用于控制具有某些共同特征的不同类型的人工昆虫。虽然他们特别证明了这种策略在两翼机器人和四翼蜜蜂+机器人上的有效性,但它也有可能应用于其他类似昆虫的微型机器人。
Perez-Arancibia认为,通过采用一种高级控制方法来解耦驱动和飞行控制问题,有可能识别出可在多个平台上使用的通用算法。例如,这种方法可以让研究人员利用19克的四旋翼飞行器开发新的飞行算法,随后可以在95毫克的四翼蜜蜂+上实现。
Perez-Arancibia说:“这很重要,因为随着机器人飞行器越来越小,它们也越来越难制造,越来越难操作,越来越昂贵。”“因此,正如我们的论文所示,同样的方法可以用于合成权重差异高达两个数量级的平台的控制器,这一事实从研究和实践的角度都是重要的和相关的。”
在未来,南加州大学的这组研究人员引入的方法可以为类似昆虫的微型机器人的新控制器的设计和实现提供信息。另外,在接下来的几个月里,Perez-Arancibia和他的同事将致力于一个不同的项目,目的是创造第一个完全自主的亚克飞行人工昆虫。
Perez-Arancibia说:“目前,蓝冠2测速阻碍微型机器人实现亚克量级自主飞行的主要限制是电池的超低能量密度。”“我们将通过使用由催化反应提供动力的人造肌肉来实现自主。”